

ELEV-8 V3 - Flt 4 - crash report

4th flight - drone flipped and broke to propellers.
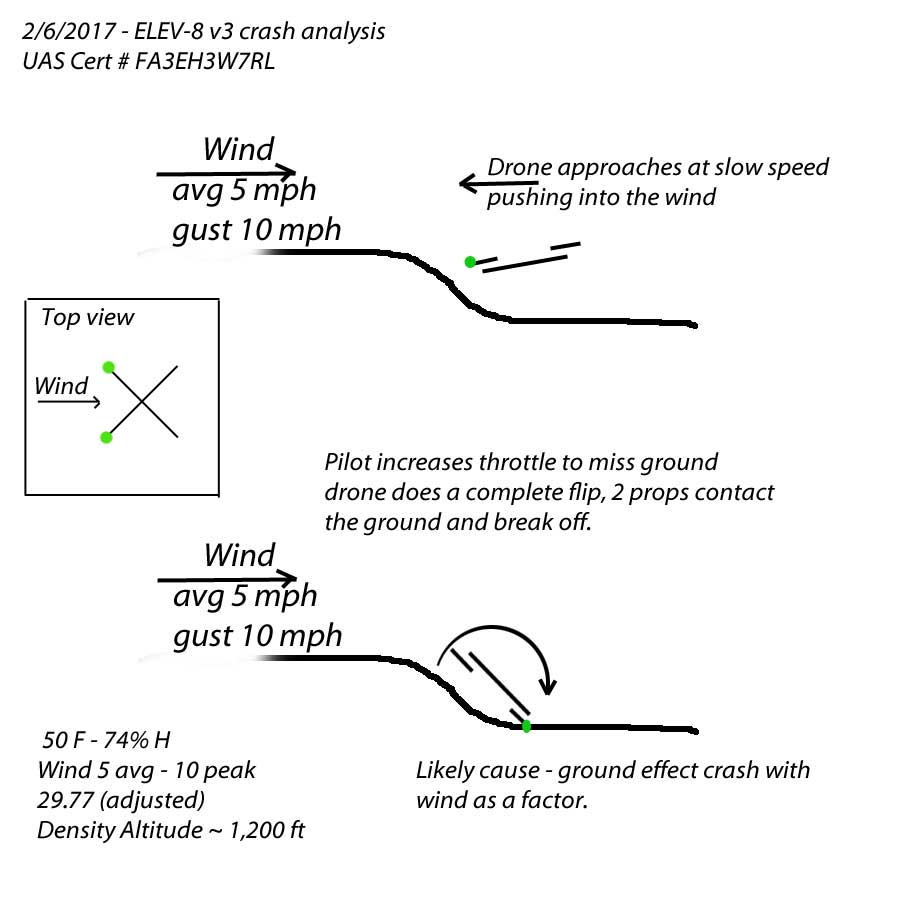
My analysis is that this was a ground effect crash - here's a picture with the details:
(Please comment)
My analysis is that this was a ground effect crash - here's a picture with the details:
(Please comment)
900 x 900 - 57K
Comments
Ken Gracey
When I get close to the ground I fly in self-leveling mode, even in calm conditions, ground effect can be hard to tame!
This is my first exposure to the aviation world - I have to admit I'm impressed by the wealth of knowledge and 'rules of the road' that I never knew existed about flying. I'm trying to approach learning about it as professionally as I can - I'm sure this isn't news to the rest of this group, but while drones are sold as toys (not referring to Parallax, but to the general retail market) - they are anything but.
First experience? You listed density altitude in your report. That's spectacular. Welcome to the hobby!
I can't help with the data logging, I know there's telemetry and ground station software so it's definitely possible. Someone else is sure to chime in about that.
Happy flying!
1) What was you altitude above ground level?
2) At what approximate speed (and/or pitch angle) was the ELEV-8 traveling at when the incident occurred?
I do believe there is (or was) some code in the firmware for data logging, but I don't know how it works or what hardware to use it with. Hopefully Jason can enlighten us.
Altitude was front of drone was probably about 12" off the ground while the back was probably about 18". I'm pretty sure I was pushing the throttle up - not a lot but some.
The slope is more gradual than the drawing - from peak to valley is 24" - and top to flat is about 7 feet.
The pitch angle was about what the image is - the speed was slow, not really familiar with estimating - but maybe walking speed - 2-3 MPH.
KenMc
I'd really like to have another Prop on-board to do full logging of all internal state, but that's not a small undertaking.
I have personally flipped mine exactly once when doing a hard forward run followed by a hard opposite-direction stop. The quad flipped front-to-back and plopped down in the grass upside down. There's a possibility that the control vector estimator incorrectly chose the inverted version of the direction. I'll take a look at the code and see if I can figure out if that's even possible.
If you were in "manual" control mode it's hard to rule out user error or just overshoot, but if you were flying in one of the two auto-level modes it shouldn't be able to go upside down, ever, unless you were flying in a hurricane or something, or changed direction really hard and then killed the throttle. What you describe doesn't sound like either of those.
No abrupt change in direction - I've only got about an hour with this drone - but I don't overcompensate.
No, nothing additional mounted.
Although - come to think of it I was flying right next to a pole that has a weather station that uses WIFI back to its display. An Accurite.
The pole is aluminum - about 12 feet high and mounted on a steel pipe. Still, I was right next to that when the crash occurred.
I surveyed the WIFI environment close to the spot where the drone flipped with NetSpot.
There's 5 WAPs with a 2.4GHz signal - my WAP has a -80 dB signal - the rest are negligible. Noise is about -90 dB.
Does the ELEV-8 firmware allow flipping more than 180 deg?
Suppose I am in level flight. Then encounter freak windshear that flips me more than 90 deg. Say it flips me 185 deg. Will the computer know that it's upside down (plus 5 deg)?
I've done a bunch of testing including throw-tests, flipping in actual flight, and flipping in tethered flight to make sure it all works as expected.
I'd be surprised if a windshear could actually flip you - Unless you have the PID's turned way down, the quad fights you really hard when you deviate it even 10 degrees.
This was not a 'ground effect' flip - it was a battery running out flip.
I flew today and tried making the flip happen - same spot same motion - not even a slight hick up.
Looking back at the battery records - and considering that this was a long flight - I'm certain now that the batter was failing - which caused the flip.
KenMc