

Popsicle Stick Hexapod Attempt (walks with tether)
 Duane Degn
Posts: 10,588
Duane Degn
Posts: 10,588
Edit: See post #2 for videos of the robot walking with tether.
By popular demand, here's my attempt at a hexapod.
After seeing several robots made from chopsticks, I thought I'd try to make a robot with popsicle sticks. I was concerned about the the sticks being too long for the size of servos I was using but I didn't want to ruin the popsicle stick look by cutting the sticks shorter than normal.
If I change the angle of the legs a bit, it might be possible for this robot to walk on a tether. I'll likely switch to more powerful servos and/or shorter legs.
Here's a picture of a very early version. (It was too short.)

I liked the dimensions but the legs were too close together to let them move much.
Since the servos weren't powered in the photo, I had to have the legs at a certain angle in order for the robot to stand up on its own. Maybe if I used similar angles when the robot is under power, it would be able to hold itself up while walking? I might give it a try.
So here's a video of the robot's failed attempt at walking. (Make sure and watch the videos in the second post.)
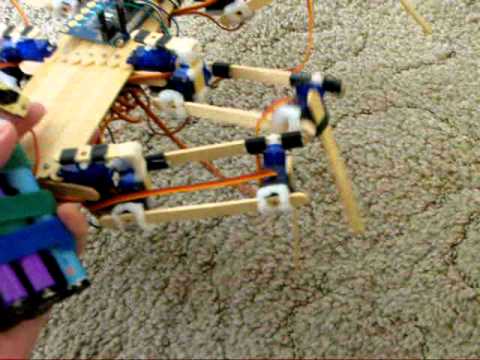
As you can see in the video (but not very well), I'm using Lego turntables on the bottom of the servos in order take some of the sideways torque from off the servo horn. I think the turntables let the servo move a heavier load.
I'm using PolyMorph and Gorilla Tape to hold the joints together. I'm also using 2 mm nuts and bolts and double sided foam tape to hold the robot together.
The robot in the top picture doesn't have any PolyMorph in it. I had initially tried to hold the joints together with double sided foam tape and Gorilla Tape. The PolyMorph is a lot better for some applications than Gorilla Tape like holding Lego turntables to popsicle sticks.
By popular demand, here's my attempt at a hexapod.
After seeing several robots made from chopsticks, I thought I'd try to make a robot with popsicle sticks. I was concerned about the the sticks being too long for the size of servos I was using but I didn't want to ruin the popsicle stick look by cutting the sticks shorter than normal.
If I change the angle of the legs a bit, it might be possible for this robot to walk on a tether. I'll likely switch to more powerful servos and/or shorter legs.
Here's a picture of a very early version. (It was too short.)
I liked the dimensions but the legs were too close together to let them move much.
Since the servos weren't powered in the photo, I had to have the legs at a certain angle in order for the robot to stand up on its own. Maybe if I used similar angles when the robot is under power, it would be able to hold itself up while walking? I might give it a try.
So here's a video of the robot's failed attempt at walking. (Make sure and watch the videos in the second post.)
As you can see in the video (but not very well), I'm using Lego turntables on the bottom of the servos in order take some of the sideways torque from off the servo horn. I think the turntables let the servo move a heavier load.
I'm using PolyMorph and Gorilla Tape to hold the joints together. I'm also using 2 mm nuts and bolts and double sided foam tape to hold the robot together.
The robot in the top picture doesn't have any PolyMorph in it. I had initially tried to hold the joints together with double sided foam tape and Gorilla Tape. The PolyMorph is a lot better for some applications than Gorilla Tape like holding Lego turntables to popsicle sticks.
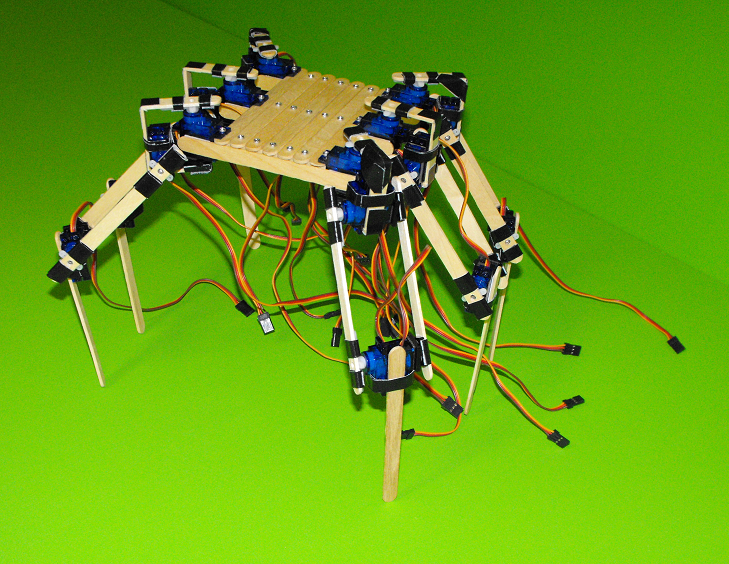
729 x 564 - 990K
Comments
Here are a couple of more videos of the Popsicle Stick Bot barely walking.
I didn't expect the robot to walk so far. I wasn't moving the batteries along with the robot so it pulled the plug on itself.
I decided to make another video of it continuing to walk. Not much different in this video. It may walk a little longer than the previous one since I remembered to move the batteries as the robot walked away from them.
I'm not so confident about my inverse kinematic equations. When I initially changed the "Z" axis amount the knee joint moved in the wrong direction. So either I just had a sign backwards or something is seriously wrong with my equations. I'm confident I can get them straightened out though (if the change in sign hasn't already fixed the problem).
So the video in the first post did not have correct IK movements.
BTW, the small quadropod I've been picturing would use all 9g servos with VERY short legs, proportioned about like Boston Dynamics' Big Dog robot scaled to an Altoids tin body, so each leg link would be something like 1.25 inches, making each leg ~2.5" overall. Small loads should make the servos last a while.
Captain Obvious
I haven't decided how I'll alter the bot to give it a better chance at walking. I did try one really bad idea of powering the servos with a 2-cell LiPo. It killed two of the servos pretty fast.
As you know, I have lots of the larger metal gear servos. If I switch to the larger servos, I might switch them all out or just switch the hip servos. It will be almost as much work to just switch the hip servo as to switch them all.
I just finished soldering up some extension wires to give tetherd walking another try. I still wonder if I used angles like those in my top photo, if the bot would be able to walk (without carrying batteries).
For the record, I agree with GeorgeCollins that tethered robots are cheating (his says something to that effect on his website). But I do see their usefulness in testing designs.
Long ago, someone tried to make a cost-reduced (el cheapo) walking horse. None of the legs moved, they were sculpted in place. Tiny motorized eccentric wheels inside each hoof sort of gave the animal a bad limp at best. Later, the fairly lame horse was nicknamed Elmer, as it appeared the only place he was fit to walk to was directly to the glue factory.
LiPos are your best power density. If need be, throw in 3-4 series diodes to drop the voltage to a safe level. On my robot arm, I'm powering the servos at 3.8V (3xAA MiMH) for smoother action, so I could switch to a single LiPo.
By changing the stance of the bot, I was able to reduce the torque on the servos. It's still can't carry batteries but it did walk. I took the QuickStart board from off the top of the robot and had it hang from underneath. I think the lower center of gravity from the hanging QS board helped it walk longer than it normally would have.
This is likely the end of this version of the bot. It's going to need some major modifications before it walks again.
Looks like a cute & colorful way to build a bot. I've seen those prepainted popsicle sticks at the store, might have to nab some. Wood is a great building material considering, strength, weight, stiffness, and price.